|
Y. Li, D. Gunopulos, C. Lu, and L. Guibas, Urban Travel Time Prediction using a Small Number of GPS Floating Cars, SIGSPATIAL/GIS, 2017.
Abstract:
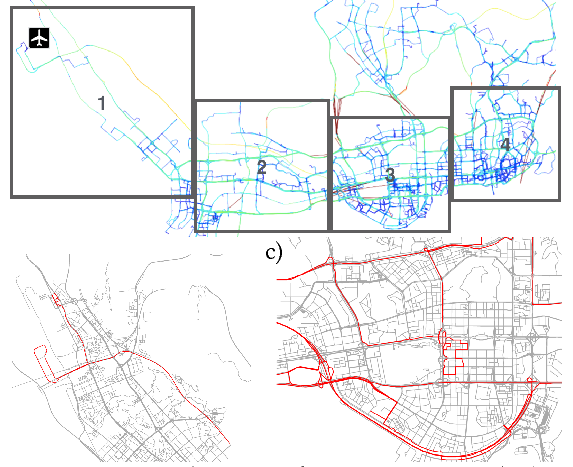
Predicting the travel time of a path is an important task in route planning and navigation applications. As more GPS floating car data has been collected to monitor urban traffic, GPS trajectories of floating cars have been frequently used to predict path travel time. However, most trajectory-based methods rely on deploying GPS devices and collect real-time data on a large taxi fleet, which can be expensive and unreliable in smaller cities. This work deals with the problem of predicting path travel time when only a small number of GPS floating cars are available. We developed an algorithm that learns local congestion patterns of a compact set of frequently shared paths from historical data. Given a travel time prediction query, we identify the current congestion patterns around the query path from recent trajectories, then infer its travel time in the near future. Experimental results using 10-15 taxis tracked for 11 months in urban areas of Shenzhen, China show that our prediction has on average 5.4 minutes of error on trips of duration 10-75 minutes. This result improves the baseline approach of using purely historical trajectories by 2-30% on regions with various degree of path regularity. It also outperforms a state-of-the-art travel time prediction method that uses both historical trajectories and real-time trajectories.
Bibtex:
@inproceedings{lglg-uttpsng-17,
author = {Li, Yang and Gunopulos, Dimitrios and Lu, Cewu and Guibas, Leonidas},
title = {Urban Travel Time Prediction Using a Small Number of GPS Floating Cars},
booktitle = {Proceedings of the 25th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems},
series = {SIGSPATIAL '17},
year = {2017}
}
|
 |