|
Nan Hu, Raif M. Rustamov, and Leonidas Guibas, Graph Matching with Anchor Nodes: A Learning Approach, CVPR2013
Abstract:
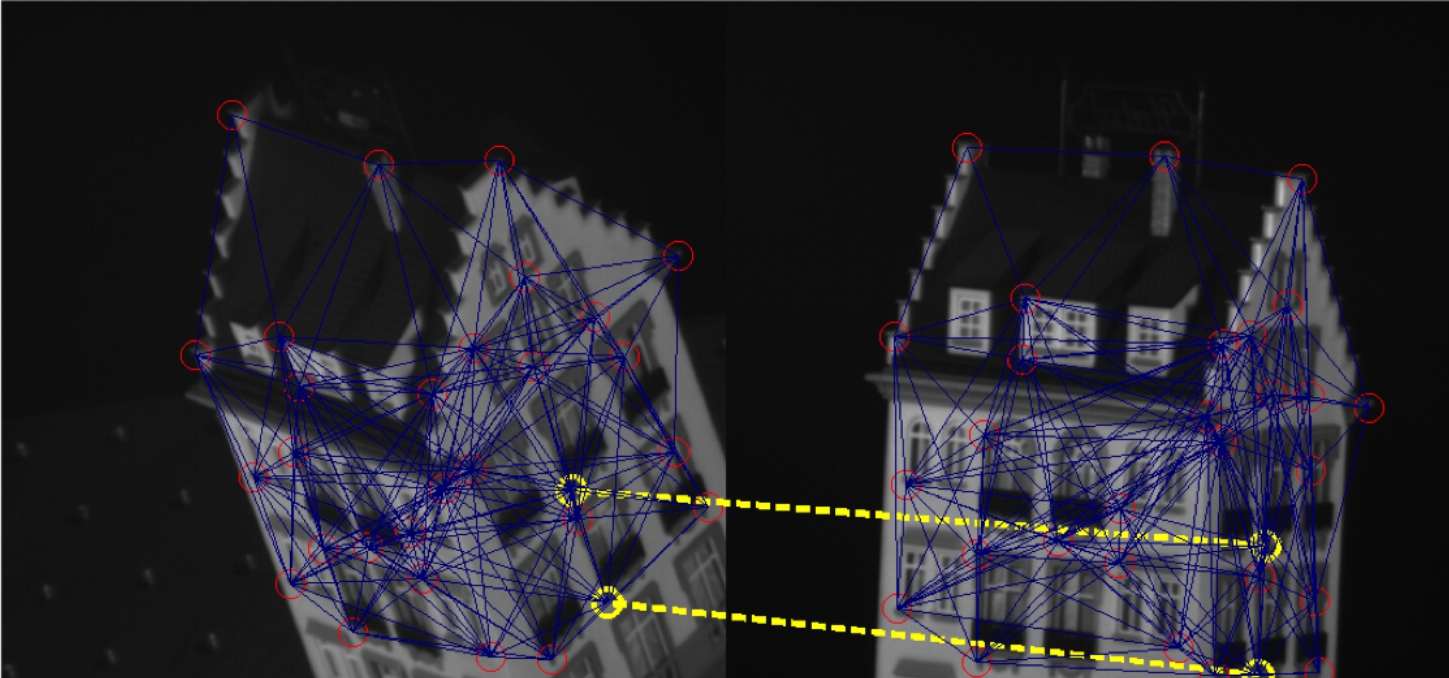
In this paper, we consider the weighted graph matching problem with partially disclosed correspondences between a number of anchor nodes. Our construction exploits recently introduced node signatures based on graph Laplacians, namely the Laplacian family signature (LFS) on the nodes, and the pairwise heat kernel map on the edges. In this paper, without assuming an explicit form of parametric dependence nor a distance metric between node signatures, we formulate an optimization problem which incorporates the knowledge of anchor nodes. Solving this problem gives us an optimized proximity measure specific to the graphs under consideration. Using this as a first order compatibility term, we then set up an integer quadratic program (IQP) to solve for a near optimal graph matching. Our experiments demonstrate the superior performance of our approach on randomly generated graphs and on two widely-used image sequences, when compared with other existing signature and adjacency matrix based graph matching methods.
Bibtex:
@InProceedings{hrg-gmanla-2013,
author = {Nan Hu and Raif M. Rustamov and Leonidas Guibas},
title = {Graph Matching with Anchor Nodes: A Learning Approach},
journal = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2013},
pages = {2906-2913}
}
|
 |