|
Yichen Li*, Kaichun Mo*, Lin Shao, Minhyuk Sung, and Leonidas J. Guibas, Learning 3D Part Assembly from a Single Image, European Conference on Computer Vision (ECCV) 2020
Abstract:
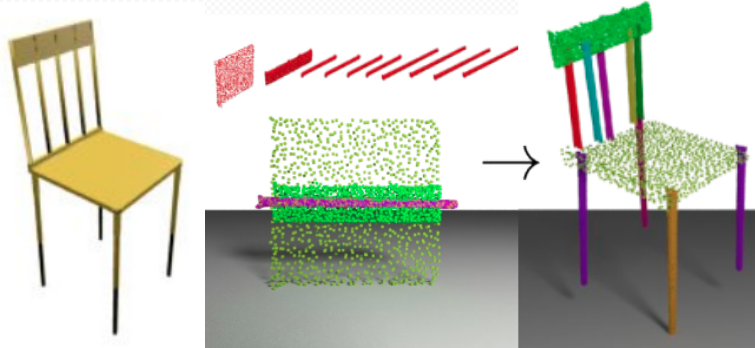
Autonomous assembly is a crucial capability for robots in many applications. For this task, several problems such as obstacle avoidance, motion planning, and actuator control have been extensively studied in robotics. However, when it comes to task specification, the space of possibilities remains underexplored. Towards this end, we introduce a novel problem, single-image-guided 3D part assembly, along with a learningbased solution. We study this problem in the setting of furniture assembly from a given complete set of parts and a single image depicting the entire assembled object. Multiple challenges exist in this setting, including handling ambiguity among parts (e.g., slats in a chair back and leg stretchers) and 3D pose prediction for parts and part subassemblies, whether visible or occluded. We address these issues by proposing a two-module pipeline that leverages strong 2D-3D correspondences and assembly-oriented graph message-passing to infer part relationships. In experiments with a PartNet-based synthetic benchmark, we demonstrate the effectiveness of our framework as compared with three baseline approaches.
Bibtex:
@article{li2020impartass,
title={Learning 3D Part Assembly from a Single Image},
author={Li, Yichen and Mo, Kaichun and Shao, Lin and Sung, Minghyuk and Guibas, Leonidas},
journal={European conference on computer vision (ECCV 2020)},
year={2020}
}
|
 |