|
Kaichun Mo, Yuzhe Qin, Fanbo Xiang, Hao Su and Leonidas J. Guibas, O2O-Afford: Annotation-Free Large-Scale Object-Object Affordance Learning, Conference on Robot Learning (CoRL) 2021
Abstract:
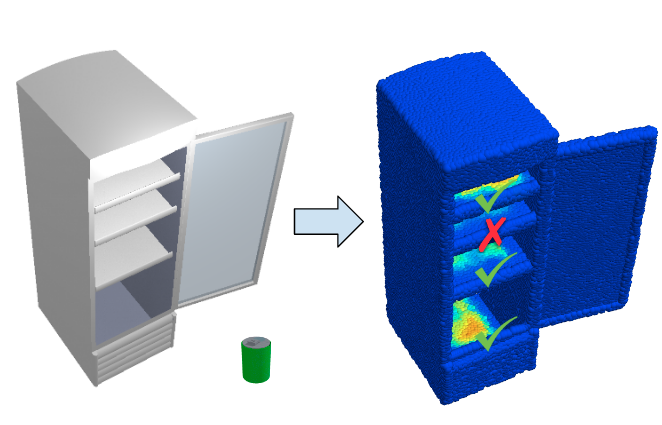
Contrary to the vast literature in modeling, perceiving, and understanding agent-object (e.g., human-object, hand-object, robot-object) interaction in computer vision and robotics, very few past works have studied the task of object-object interaction, which also plays an important role in robotic manipulation and planning tasks. There is a rich space of object-object interaction scenarios in our daily life, such as placing an object on a messy tabletop, fitting an object inside a drawer, pushing an object using a tool, etc. In this paper, we propose a unified affordance learning framework to learn object-object interaction for various tasks. By constructing four object-object interaction task environments using physical simulation (SAPIEN) and thousands of ShapeNet models with rich geometric diversity, we are able to conduct large-scale object-object affordance learning without the need for human annotations or demonstrations. At the core of technical contribution, we propose an object-kernel point convolution network to reason about detailed interaction between two objects. Experiments on large-scale synthetic data and real-world data prove the effectiveness of the proposed approach.
Bibtex:
@inProceedings{mo2021o2oafford,
title={{O2O-Afford}: Annotation-Free Large-Scale Object-Object Affordance Learning},
author={Mo, Kaichun and Qin, Yuzhe and Xiang, Fanbo and Su, Hao and Guibas, Leonidas},
year={2021},
booktitle={Conference on Robot Learning (CoRL)}
}
|
 |